Home automation module that can be used as a stand-alone single or dual axis solar tracker, working autonomously.
Can also be controlled by a home automation system, like Domoticz (DomBusTracker version with DomBus protocol firmware), Home Assistant, Node-RED, OpenHAB, ... (DomBusTracker version with Modbus protocol firmware).
Please select the English page for the most up-to-date original information.
Dual axis solar tracker
Sun tracker is very good for photovoltaic systems because enhances the total production energy and, moreover, increases the power during the early morning and late afternoon, when energy is more expensive and less available.
The following chart shows the comparison of the energy produced in a sunny day, October 31 2024, in the Northern Italy, between a 2-axis solar tracker and a photovoltaic on the roof.
![]()
![]()
Comparing the two systems, we can say that in these conditions the 2-axis tracker performs almost 3 times over photovoltaic on the roof . Normally it performs almost twice a photovoltaic system on a roof oriented to South, with a normal tilt for italian houses (around 15 degrees). ![]() YouTube video
YouTube video
This controller is based on the chinese XMYC-3 controller, using the same sun sensor, but adding some features like the automatic detection of the limit switches inside the motors (linear actuators have limit switches inside, that cut-off power), home automation system integration (you may choose between the DomBus proprietary protocol working with Domoticz, and Modbus standard protocol working with almost any domotic controller) and automatic return to night position.
![]()
Features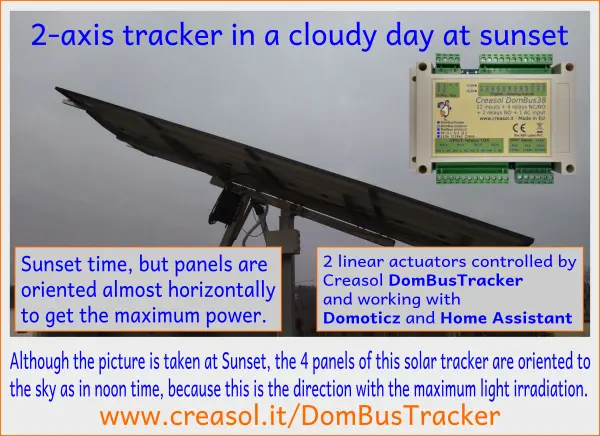
- Use a standard waterproof sun sensors made by 4 photodetectors, to determine the best tilt/azimuth even in case of clouds.
- 4x 10A relays permit to control 2 linear actuators with 800kg force (or similar), supplied by a 24V (preferred) or 12V power supply unit.
- Current sensing to automatically detect the linear actuator internal limit switches, to find the zero and full-scale motor position.
- 2 inputs that can be connected to 2 optional up/down buttons to move motors manually
- 1 input that can be connected to a optional switch to disable automatic tracking
- 2 inputs (IN10 and IN11) that can be connected to external limit switches or proximity sensors (NPN type, common to GND) for the azimuth motor (useful in case that a slewing motor is used instead of linear motor)
- 1 input (IN12) that can be connected to a wind sensor (anemomenter) with pulsed (reed) output, common to GND, that can be used to move the tracker to a safe position in case of strong wind
- 2x 10A additional relays, to enable/disable the power supply unit (saving energy consumption during the night) and more.
- 1x AC optoisolated input to detect (and notify) power outages
- Internal RS485 bus terminating resistor (150 ohm) that can be enabled by a PCB jumper (with a solder iron)
- RS485 bus, that works with up to 500m of cable (using standard alarm cable: 2x0.50+2x0.22mm² + shield)
- DIN rail low-profile enclosure, 115x90x40mm
- Plugin terminal blocks for easy wiring
- Parameters configurable by RS485 bus, to work with almost any tracking system
- Available with 2 firmwares of your choice:
- DomBus firmware, working with Domoticz, implementing the DomBus proprietary protocol
- Modbus firmware, working with NodeRED, Home Assistant, OpenHAB and many other controllers supporting the standard Modbus protocol.
- Very low power usage: 15mW with relays OFF.
- Kit supplied with 2 power resistors 0.12 Ohm 5W for current sensing (to detect motor internal limit switches), 2 varistors 33V to avoid overvoltages on motor coils and 27 Ohm resistor to supply the sun sensor.
- Red/green LED showing the current status:
Green LED flashing every 4s Tracker in the night/rest position Green LED flashing every second Normal mode (automatic) Green LED flashing every 0.25s Motor On, moving Red LED flashing every second Manual mode, set by the switch input or by home automation system (MAN device) Red LED flashing every 0.25s Wind gust detected (storm?), tracker in the safe position - Optional active buzzer (with oscillator, working at 5.5V) can be soldered on the PCB to get the following alerts:
The buzzer can be disabled by setting the parameter TrackerBuzzer = 0 (see table below)1 beep Tracker in manual mode 2 beeps Wind gust detected => tracker in safety mode
Sun sensor, actuators, 24V power supply unit and fuse protection have to be purchased apart.
Connection schematic
![]()
![]()
DomBusTracker ports capabilities (for the DomBus version)
Default address: 0xff38
| Port# | Name | Capabilities | Default configuration | Description |
| 1 | MN | OUT_DIGITAL | OUT_DIGITAL | SPDT 10A relay that have to be connected to the tilt linear actuator (North/South): see schematic below. Read-only: tracker position may be changed by using the Pns and Pew control bars. |
| 2 | MS | OUT_DIGITAL | OUT_DIGITAL | SPDT 10A relay that have to be connected to the tilt linear actuator (North/South): see schematic below. Read-only: tracker position may be changed by using the Pns and Pew control bars. |
| 3 | ME | OUT_DIGITAL | OUT_DIGITAL | SPDT 10A relay that have to be connected to the tilt linear actuator (East/West): see schematic below. Read-only: tracker position may be changed by using the Pns and Pew control bars. |
| 4 | MW | OUT_DIGITAL | OUT_DIGITAL | SPDT 10A relay that have to be connected to the tilt linear actuator (East/West): see schematic below. Read-only: tracker position may be changed by using the Pns and Pew control bars. |
| 5 | RL5 | OUT_DIGITAL | OUT_DIGITAL | 10A SPST relay (only NO contact), 250Vac or 30Vdc capability, that can be used for other purposes |
| 6 | RL6 | OUT_DIGITAL | OUT_DIGITAL | 10A SPST relay (only NO contact), 250Vac or 30Vdc capability, that can be used for other purposes |
| 7 | INAC | IN_AC, IN_COUNTER | IN_AC | Optoisolated input, that can be connected to a circuit breaker (to notify power outages, expecially useful for fridges and heat pumps), PIRs with 230V output (to monitor presence), light and appliances (to monitor when light or devices are ON). |
| 8 | N | IN_ANALOG | IN_ANALOG | North light sensor. |
| 9 | S | IN_ANALOG | IN_ANALOG | South light sensor. |
| 10 | E | IN_ANALOG | IN_ANALOG | East light sensor. |
| 11 | W | IN_ANALOG | IN_ANALOG | West light sensor. |
| 12 | Ins | IN_ANALOG | IN_ANALOG | North-South (tilt) motor current sensing (used to detect internal limit switches). Domoticz devices should be configured as IN_ANALOG,A=0.00042,TypeName=Current (Single) |
| 13 | Iew | IN_ANALOG | IN_ANALOG | North-South (tilt) motor current sensing (used to detect internal limit switches). Domoticz devices should be configured as IN_ANALOG,A=0.00042,TypeName=Current (Single) |
| 14 | Bns | IN_TWINBUTTON | IN_TWINBUTTON |
Analog input that can be connected to an optional external dual button (UP/DOWN connected together with a 10k resistor) to manually move the motor SN (elevation/tilt). |
| 15 | Bew | IN_TWINBUTTON | IN_TWINBUTTON |
Analog input that can be connected to an optional external dual button (UP/DOWN connected together with a 10k resistor) to manually move the motor EW (azimuth). |
| 16 | Sman | IN_DIGITAL | IN_DIGITAL | INVERTED |
Digital input that can be connected to an optional switch to disable automatic mode. It can be used for maintenance, or for blocking motors in a safe position before a storm in case that DomBusTracker is not managed by a domotic controller. |
| 17 | IN10 | IN_DIGITAL, IN_DIGITAL_PULLDOWN, IN_ANALOG, IN_TWINBUTTON, IN_COUNTER | IN_DIGITAL |
Analog or digital input, with optional 10k pullup (pcb jumper) and optional internal pulldown (activated when configured as IN_DIGITAL_PULLDOWN). |
| 18 | IN11 | IN_DIGITAL, IN_DIGITAL_PULLDOWN, IN_COUNTER | IN_DIGITAL |
Digital input, with internal pullup or optional internal pulldown (activated when configured as IN_DIGITAL_PULLDOWN). |
| 19 | IN12 | IN_DIGITAL, IN_DIGITAL_PULLDOWN, IN_COUNTER | IN_DIGITAL |
Digital input, with internal pullup or optional internal pulldown (activated when configured as IN_DIGITAL_PULLDOWN). |
| 20 | NS | CUSTOM | CUSTOM |
0-100% bar showing the deviation of the maximum NS radiation direction from the current tilt position |
| 21 | EW | CUSTOM | CUSTOM |
0-100% bar showing the deviation of the maximum EW radiation direction from the current azimuth position |
| 22 |
Pns |
CUSTOM | CUSTOM |
0-100% bar showing the current tilt position |
| 23 | Pew | CUSTOM | CUSTOM |
0-100% bar showing the current azimuth position |
| 24 | Man | OUT_DIGITAL | OUT_DIGITAL |
If Off, tracker is in automatic tracking mode. |
DomBusTracker Modbus RTU capabilities (for the Modbus version)
At power-on, the module shows on red LED the current Modbus slave address (register address=8192) in decimal format, on green LED the serial baudrate (reg. 8193), and finally on red LED the serial parity (reg. 8194).
If a value is zero, a long flash is emitted.
For example, if reg(8192)=56, reg(8193)=0, reg(8194)=0, at power the following led flashes will be shown:
5 red flashes, pause, 6 red flashes (slave address= 0x38 = 56 decimal), pause, 1 long green flash (reg(8193)=0 => baudrate=115200bps), pause, 1 long red flash (reg(8194)=0 => parity=None).
Device will be operative only when address/baudrate/parity parameters have been shown: then module will accept commands by Modbus RTU, and periodically shows output status for all ports, from 1 to max port: green flash means that port status is Off, red flash means that port is On.
Default slave address: 56 (0x38)
| Addr | Name | Values | Description |
| 0 | MN | 0=OFF, 1=ON. Read only. Tracker position may be changed by using the Pns and Pew control bars. |
SPDT 10A relay that have to be connected to the tilt linear actuator (North/South): see schematic below. Read-only |
| 1 | MS |
0=OFF, 1=ON. Read only. |
SPDT 10A relay that have to be connected to the tilt linear actuator (North/South): see schematic below. Read-only |
| 2 | ME | 0=OFF, 1=ON. Read only. Tracker position may be changed by using the Pns and Pew control bars. |
SPDT 10A relay that have to be connected to the tilt linear actuator (East/West): see schematic below. Read-only |
| 3 | MW | 0=OFF, 1=ON. Read only. Tracker position may be changed by using the Pns and Pew control bars. |
SPDT 10A relay that have to be connected to the tilt linear actuator (East/West): see schematic below. Read-only |
| 4 | RL5 | 0=OFF, 1 or 65280=ON, 2-65279=ON for specified time. Logic can be inverted specifying the INVERTED option (on address 512+port) |
SPST 10A, that can be used for other purposes |
| 5 | RL6 | 0=OFF, 1 or 65280=ON, 2-65279=ON for specified time. Logic can be inverted specifying the INVERTED option (on address 512+port) |
SPST 10A, that can be used for other purposes |
| 6 | INAC | 0=OFF (floating), 1=ON (100-250V signal detected) | Optoisolated input, that can be connected to a circuit breaker (to notify power outages, expecially for fridges and heat pumps), PIRs with 230V output (to monitor presence), light and appliances (to monitor when light or devices are ON). |
| 7 | N | 0-65520 depending by the solar radiation received by this sensor. | North light sensor. |
| 8 | S | 0-65520 depending by the solar radiation received by this sensor. | South light sensor. |
| 9 | E | 0-65520 depending by the solar radiation received by this sensor. | East light sensor. |
| 10 | W | 0-65520 depending by the solar radiation received by this sensor. | West light sensor. |
| 11 | Ins | 0=OFF, >0 = 16-65520 if motor current is detected. Ins = value*0.00042 [A] in case that sensing resistor is 0.12Ohm |
North-South (tilt) motor current sensing (used to detect internal limit switches). Domoticz devices should be configured as IN_ANALOG,A=0.00042,TypeName=Current (Single) |
| 12 | Iew | 0=OFF, >0 = 16-65520 if motor current is detected. Ins = value*0.00042 [A] in case that sensing resistor is 0.12Ohm |
North-South (tilt) motor current sensing (used to detect internal limit switches). Domoticz devices should be configured as IN_ANALOG,A=0.00042,TypeName=Current (Single) |
| 13 | Bns | 0=OFF, 10=DOWN, 20=UP | Used to manually control the SN motor (for tilt/elevation) by an external UP/DOWN dual button |
| 14 | Bew | 0=OFF, 10=DOWN, 20=UP | Used to manually control the EW motor (for azimuth) by an external UP/DOWN dual button. |
| 15 | Sman | 0=AUTO, 1=MANUAL/STOP |
Used to manually disable motors by an external switch connected to GND: motor will be moved manually, by the Bns and Bew dual buttons, or by the Pns and Pew domotic controllers. |
| 16 | IN10 |
0=OFF, 1=ON. |
Analog or digital input, with optional 10k pullup (pcb jumper) and optional internal pulldown (activated when configured as IN_DIGITAL_PULLDOWN). |
| 17 | IN11 | 0=OFF, 1=ON. Logic can be inverted specifying the INVERTED option (on address 512+port) |
Digital input, with internal pullup or optional internal pulldown (activated when configured as IN_DIGITAL_PULLDOWN). |
| 18 | IN12 | 0=OFF, 1=ON. Logic can be inverted specifying the INVERTED option (on address 512+port). |
Digital input, with internal pullup or optional internal pulldown (activated when configured as IN_DIGITAL_PULLDOWN). |
| 19 | NS | 0=max radiation from the "North" side (minimum tilt). 100=max radiation from the "South" side (maximum tilt). |
0-100% bar showing the deviation of the maximum NS radiation direction from the current tilt position. |
| 20 | EW | 0=max radiation from East side. 100=max radiation from West side. |
0-100% bar showing the deviation of the maximum EW radiation direction from the current azimuth position |
| 21 |
Pns |
0=minimum tilt. 100=maximum tilt |
0-100% bar showing the current tilt position. Also, setting this register to a value between 0 and 100 automatically move the tracker to this position and set the register Man (23) to the value 1 (tracker in manual mode => no automatic tracker): in this case the automatic tracking function is disabled, useful to control the solar panel manually for example to lock the tracker in a safe position in case of hail or strong wind. |
| 22 | Pew | 0=minimum azimuth (East). 100=maximum azimuth (West) |
0-100% bar showing the current azimuth position. Also, setting this register to a value between 0 and 100 automatically move the tracker to this position and set the register Man (23) to the value 1 (tracker in manual mode => no automatic tracker): in this case the automatic tracking function is disabled, useful to control the solar panel manually for example to lock the tracker in a safe position in case of hail or strong wind. |
| 23 | Man | 0=Automatic mode. 1=Manual mode. |
If Off, tracker is in automatic tracking mode. |
| 255 | All input ports | bitmask: 1=> MN, 2=>MS, 4=>ME ... |
This address is used to check input state in one command |
| 256-273 | Port config | 1=OUT_DIGITAL, 2=OUT_RELAY_LP, ... |
Command used to configure port 1 (256), port 2 (257), ... as OUT_DIGITAL or OUT_RELAY_LP (low power consumption relay) or other value (see table below) |
| 512-529 | Port option | 0=NORMAL, 1=INVERTED (output normally ON, or input is ON when port voltage is 0V) | Set port option. If set to 1, output stays ON after boot until the port is asserted (then relays goes OFF). For inputs, setting INVERTED the port value is ON (1) when input voltage is 0V, OFF when input is left open with internal pullhigh enabled. |
| 8192 | Slave Address | 1-247 | Permits to change the slave address of the module, so it's possible to add other modules to the same bus |
| 8193 | Serial bitrate | 0=115200bps, 1=57600, 2=38400, 3=19200, 4=9600, 5=4800, 6=2400, 7=1200bps | Serial speed, default 115200 bps 8,n,1 |
| 8194 | Serial parity | 0=None, 1=Even, 2=Odd | Serial parity, default none (115200 bps 8,n,1) |
| 8198 | Revision, major | Read only | Get firmware version, major number. For example "02" means that revision is "02XX" where XX defined by parameter 8199 |
| 8199 | Revision, minor | Read only | Get firmware version, minor number. For example "h1" means that revision is "XXh1" where XX defined by parameter 8198 |
It's possible to activate one or more outputs for a certain amount of time (monostable/timer output) as indicated in the table. The parameter corresponding to the needed time can be computed using the following rules:
From 0 to 60s => 31.25ms resolution 2=62.5ms, 3=93.75ms, ... 1920=60s => value=time_in_milliseconds/31.5
From 1m to 1h with 1s resolution 1921=61s, 3540+1920=5460=1h => value=(time_in_seconds-60)+1920
From 1h to 1d with 1m resolution 5461=1h+1m, 1380+5460=6840=24h => value=(time_in_minutes-60)+5460
From 1d to 1500 days with 1h resolution 6841=25h, 6842=26h, and so on => value=(time_in_hours-24)+6840
The following tables show some Modbus commands examples.
| Slave Addr | Func. Code | Reg.Addr | Reg.Value | Frame | Description |
| 56 | 06 | 8192 | 1 | [37][06][20][00][00][01][xx][xx] | Change slave address from 54 (0x36) to 1 |
| 01 | 06 | 8193 | 4 | [01][06][20][01][00][04][D2][09] | Set serial speed to 9600bps |
| 01 | 06 | 8194 | 1 | [01][06][20][02][00][01][E2][0A] | Set even parity |
| 49 | 10 | 8192 | 1,4,1 | [31][10][20][00][00][03][06][00][01][00][04][00][01][B1][71] | With a single command, set slave address to 1, serial speed to 9600bps, even parity. Original modules address was 49 (0x31) in this example. |
| 01 | 06 | 0 | 65280 | [01][06][00][00][FF][00][C8][3A] | Activate RL1 output forever (65280=0xff00) |
| 01 | 06 | 1 | 960 | [01][06][00][01][03][C0][D8][AA] | Activate RL2 for 960/32=30s |
| 01 | 06 | 255 | 0 | [01][06][00][FF][00][00][B9][FA] | Disable all outputs (Reg.Addr=255) |
| 01 | 10 | 0 | 32,0,0,65280 | [31][10][00][00][00][04][08][00][20][00][00][00][00][FF][00][E6][5C] | Set RL1 On for 1s (32), RL2 Off, RL3 Off, RL4 On - Max 10 registers can be set in one command |
| 01 | 03 | 255 | 1 | [01][03][00][FF][00][01][B4][3A] | Read a 16bit value with ports status. For example if returned value is 0xd1 (0b11010001), output status is: RL8=On, RL7=On, RL6=Off, RL5=On, RL4=Off, RL3=Off, RL2=Off, RL1=On |
| 01 | 03 | 8198 | 2 | [01][03][20][06][00][02][2F][CA] | Read 4 bytes within module version. For example, if returned value is <30><32><68><31> (in hex format), the corresponding ASCII value is "02h1" (Firmware 02h1) |
| 01 | 0F | 0 | 8,1,0xd1 | [01][0F][00][00][00][08][01][D1][3E][C9] | Set coil status to 0xd1 (0b11010001), activating RL8, RL7, RL5, RL1 and disabling other relays |
| 01 | 01 | 0 | 8 | [01][01][00][00][00][08][3D][CC] | Read coil status. If returned value is 0xd1 (0b11010001), it means that RL8, RL7, RL5 and RL1 are On |
Modbus protocol can be tested easily using a modbus program, like mbpoll for Linux:
mbpoll -v -m rtu -0 -1 -a1 -b115200 -Pnone -r 0 /dev/ttyUSB0 32 0 64 128 0 0 0 65280
to activate RL1 for 1s, R3 for 2s, RL4 for 4s and RL8 forever.
mbpoll -v -m rtu -0 -1 -a1 -b115200 -Pnone -r 255 -c 1 /dev/ttyUSB0
to read all port states.
mbpoll -v -mrtu -0 -1 -a56 -b115200 -Pnone -r 8192 /dev/ttyUSB0 1
to set the register 8192 (slave address) to the new value 1.
mbpoll -v -mrtu -0 -1 -a56 -b115200 -Pnone -r 8193 /dev/ttyUSB0 4
to set register 8193 (speed) to 9600bps
mbpoll -v -mrtu -0 -1 -a56 -b115200 -Pnone -r21 -c2 /dev/ttyUSB0
to read elevation and azimuth values (0=min, 100=max)
mbpoll -v -mrtu -0 -1 -a56 -b115200 -Pnone -r21 /dev/ttyUSB0 20 0
to set elevation to 20% (almost horizontal) and azimuth to 0% (East direction)
Configurable parameters
The following parameters can be configured by the user to set motor working times and get the tracker working as preferred.
| Parameter name | Description | Range | Default | DomBus settings |
Modbus address |
| TrackerType |
Type of sun tracker: 0 = Dual axis, 1 = horizontal single axis (axis direction N-S), 2 = tilted single axis (axis direction: E-W) |
0÷2 | 0 | PAR1=0 on port MN | 11000 |
| PeriodicTrackerCheck | Time to wait before moving the motors again, during tracking | 10-600 seconds | 300 | INIT=300 on port Man (Manual On/Off virtual device) | 10023 |
| TrackerSensorMin | Threshold for sensors N+S to distinguish between night and day | 16-16384 | 1536 | INIT=1536 on port MS (Motor S coil) | 10001 |
| TrackerNightTime | Time to wait from night detection before moving to the night position | 60-43200 seconds | 300 | INIT=300 on port MW (Motor W coil) | 10003 |
| TrackerNightPositionNS | Night tilt position (percentage: 0=horizontal, 100=vertical) | 0-100 | 20 | INIT=20 on port MN (Motor N coil) | 10000 |
| TrackerNightPositionEW | Night azimuth position (percentage: 0=East, 100=West) | 0-100 | 0 | INIT=0 on port ME | 10002 |
| WorkingTimeNS | Tilt actuatator working time | 10-600 seconds | 100 | INIT=100 on port Pns (Position percentage NS) | 10021 |
| WorkingTimeEW | Azimuth actuatator working time | 10-600 seconds | 100 | INIT=100 on port Pew (Position percentage EW) | 10022 |
| TrackerCurrentMinNS | Threshold to determine if current is flowing through the motor NS | 16÷16384 | 144 | INIT=144 on port Ins (current measured on Motor NS) | 10011 |
| TrackerCurrentMinEW | Threshold to determine if current is flowing through the motor EW | 16÷16384 | 144 | INIT=144 on port Iew (current measured on Motor EW) | 10012 |
| TrackerBuzzer |
0=Disable buzzer output |
0÷1 | 1 | INIT=0 on port Buzz | 10025 |
| TrackerWindThreshold |
0=Disabled |
0÷400 | 0 | INIT=25 on port Wind |
10018 |
| TrackerWindStartTime |
0=immediate entering safe mode 1÷3600=enter safe mode after this time (in seconds) where wind speed is always greater than TrackerWindThreshold |
0÷3600 | 30 | PAR1=30 on port Wind |
11018 |
| TrackerWindRecoveryTime |
Time to wait before returning from safe to automatic mode, when wind speed drops below TrackerWindThreshold level |
30÷3600 | 300 | PAR2=300 on port Wind | 12018 |
| TrackerWindPositionNS |
Tracker elevation in safe position (percentage: 0=horizontal, 100=vertical) |
0÷100 | 10 | PAR3=0 on port Wind | 13018 |
| TrackerWindPositionEW |
Tracker azimuth in safe position (percentage: 0=East, 100=West) |
0÷100 | 10 | PAR4=0 on port Wind | 14018 |
How to configure DomBusTracker with Domoticz
DomBus protocol version is needed to work with Domoticz.
The Creasol DomBus plugin should be installed: it may be downloaded from https://github.com/CreasolTech/CreasolDomBus or it can be installed from Python Plugin Manager or Domoticz Plugins Manager.
The configuration steps are:
- Once connected to Domoticz controller, you can see a new device in the Switches panel with address ff38: edit that device and add in the Description field the text ,HWADDR=0x3801 to change its default address to 3801 or another unique value: then refresh Switches panel to see all devices, each for each port. Some other devices will be found in Utility panel (light and current sensors).
- Configure the motor working times, in seconds, by writing in the Description field of Pns device ,INIT=80 if time to go from horizontal to vertical position (or vice versa) is 80s, and write in the Description field of Pew device ,INIT=140 if total time to move the tracker from East to West is 140s.
- Configure the morning / sleep position: for example, TrackerNightPositionNS=20 (tilt=20%, almost horizontally, addr=10000) and TrackerNightPositionEW=0 (azimuth=0%, toward East, addr=10002).
- In case that a wind sensor is connected, configure the parameter TrackerWindThreshold, TrackerWindStartTime, TrackerWindRecoveryTime, TrackerWindPositionNS, TrackerWindPositionEW (see the configuration table below): when tracker is in automatic mode (not MANUAL!) and anemometer produces a frequency higher than TrackerWindThreshold for at least TrackerWindStartTime seconds, it move the tracker to the TrackerWindPositionNS/TrackerWindPositionEW. When anemometer frequency remains below the TrackerWindThreshold for more than TrackerWindRecoverTime, tracker returns to the previous position, then start tracking automatically.
- If needed, change other parameters explained in the section Configurable parameters above.
- Tracker can be moved by pushbuttons, if connected to IN7 and IN8 as shown in the schematic. Also it can be locked or restored in automatic mode by the switch connected to IN9. These manual commands are usually not needed.
- Tracker can be moved also from the smartphone, PC or tablet, by moving the sliders Pns (postion for tilt motor NS) and Pew (position for azimuth motor EW). For example setting Pns=0 and Pew=0 the tracker will return to the "morning" position, oriented to East and horizontally. Please note that when tracker is moved manually, the Man device is automatically set to On disabling the automatic sun tracking function. This is useful for example in case of storm: tracker can be placed manually (or by an external automation) in a safe position (for example Pns=0 and Pew=0 or 100); when storm has passed, DomBusTracker can be restored in automatic mode, setting Man=0ff to track the sun/light automatically.
![]()
How to configure DomBustracker with Home Assistant, Node-RED, OpenHAB, ioBroker
If DomBusTracker is programmed with DomBus firmware, you can install the python software DomBusGateway that implement the DomBus 2 MQTT interface with AutoDiscovery function.
In this way, the home automation system automatically detects the DomBusTracker module, creating all entities.
To configure the working parameters of the tracker, it's possible to use connect DomBusGateway by telnet, configuring each port as needed.
TODO: configuration example
How to configure DomBusTracker with Modbus firmware
Modbus firmware is very versatile because can be used in many different ways, for example with NodeRED with its UI and Modbus palette, Home Assistant using the Modbus integration, but also directly by using mbpoll or modpoll program to configure the few parameters to get it working correctly.
The configuration steps are:
- Identify the modbus parameters: slave address, bitrate, parity. They are shown at power-on using red and green leds, as specified in the DomBusTracker Modbus RTU capabilities section above (by default address=56, bitrate=115200, parity=None).
- Configure the motor working times, in seconds, by configuring the registers WorkingTimeNS (tilt working time, addr=10021) and WorkingTimeEW (azimuth working time, addr=10022).
- Configure the morning / sleep position: set for example TrackerNightPositionNS to 20% by writing 20 to address 10000, and TrackerNightPositionEW=0 by writing 0 to address 10002
- If needed, change other parameters explained in the section Configurable parameters above using the same methods above.
- Tracker can be moved by pushbuttons, if connected to IN7 and IN8 as shown in the schematic. Also it can be locked or restored in automatic mode by the switch connected to IN9. These manual commands are usually not needed.
- Tracker can be moved also from the smartphone/PC by moving the slidebars Pns (position NS or elevation/tilt) and Pew (position EW or azimuth). For example setting Pns=0 and Pew=0 the tracker will return to the safe position, oriented to East and horizontally. Please note that when tracker is moved manually, the Man device is automatically set to On disabling the automatic sun tracking function. This is useful for example in case of storm: tracker can be placed manually (or by an external automation) in a safe position (for example Pns=0 and Pew=0 or 100); when storm has passed, DomBusTracker can be restored in automatic mode (setting Man=0ff) to track the sun/light automatically.